走出实验室,这是最生动的“移动课堂”
天健网消息(记者 金东淑)“我们以前在室内水池试验过无数次,也做过各种突发预案,但今天复杂的水下环境,还是超乎我们的想象。这给我们今后的研究,提供了最真实的素材和研究方向。”2019年“水下机器人目标抓取大赛”现场,参赛师生在真海实操抓取后,不由感叹,这不仅是一场大赛,更是一个最生动的“移动课堂”。
沈阳大学代表队今天上午参加了人机协同抓取、自主抓取资格赛。这个组别衡量的是,在真实海域下人机协同能力、机器人水下机动性。机器人下水后,要在15分钟内依次完成几个任务。首先是对机器人在水下机动性的测试:要在尽可能短地时间内,在具有风浪影响的开放海域,对水下机器人的水下机动能力进行考查,机器人向水下目标移动并悬停在水下目标附近,是实施水下目标识别和抓捕的前提。大赛任务是遍历立方体。立方体悬浮在海中,要求机器人面对立方体六个面做悬停,每个面悬停3秒种才能得分。在风浪影响下,如何确保机器人的移动和悬停动作在空间上准确、时间上稳定是难点和关键,也是水下机动能力考查的重点。第二,就是对机器人在海下抓取海珍品能力的测试。每捕捞1根海参(模型)计10分。比赛限时15分钟。
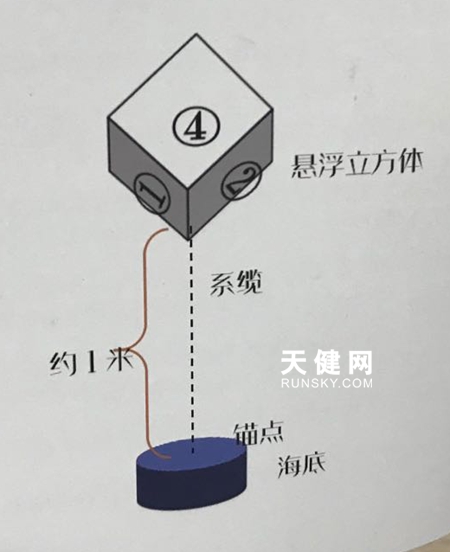
测试目标
很遗憾,沈阳大学代表队未能在规定时间内完成目标抓取。虽然成绩不尽如人意,但整个过程对参赛团队来说,再珍贵不过。他们表示:“以前都是在实验室的水池里进行抓取,这是第一次走进真实的海域。今天海浪挺大,水流也大,虽说事先有过这方面的准备,但海浪对机器人的影响还是超乎了我们的想象。这样真实的环境,对我们项目的可实用性的提升具有最实用性和参考价值。特别是海下的真实环境,对我们机器人的识别能力是一次最大的考验和挑战。这些都给我们今后的研究提供了最有力的支撑。”
大连理工大学MMCL队已有过两届参赛以历,这次也是自动抓取和定点识别组别的赛事。第一年参赛时,他们在30分钟内完成了抓取25只扇贝、2只海参和2海胆。他们的水下机器人有一个好听的名字“阿尔文”,如今具备在水深四五十米作业的能力。通过这几年的努力,视觉能力有了提升,识别的准确力也更高了。
该团队成员、大连理工大学博士生、信息与通讯专业的王洋洋告诉记者,之前,他们已在大海进行过很多次实验,但每次海浪环境都不一样。而每次实验,都让机器人的能力得到了改进。今天的现场,还是因为风浪大,未能识别到规定目标“六面体”。但海下抓取能力的成绩还算不错,15分钟抓取了2只扇贝。今天的水下环境对识别能力的考验,在他们预料之外,这就是他们今后需要提升的方向。

大连理工大学MMCL队的“阿尔文”
水下抓取

这是抓取到的2只扇贝
作为上届大赛这个项目的冠军,大连理工大学OurEDA代表队格外引人注目。卫冕冠军果然名不虚传,遍历用时仅75秒,但只捕捞到1根海参,提前10分钟就收工上岸了。据领队说是因为遇到海草了。但知情老师估计,他们应该是有所保留,上届大赛中这款机器人创造了捕捞起27根海参的佳绩。现在闭门修炼一年再次出关,机器人在动力能力、感知能力等方面均有所改进,决赛应该会有更多惊喜。
截至当天上午11时,有7支队伍参加比赛。天津大学tank代表队是成绩最好的一支。该队领队李少男介绍,这款机器人重约20公斤,长度70厘米,摄像头可旋转180度,最主要特点是设计极简,动力适宜,尽量减轻对水体的干扰,以保证能见度,提高捕捞效率。在比赛中,这款机器人遍历六个面用时125秒,捕捞海参3根,提前5分钟结束比赛。
深圳鹏程实验室副研究员杨仁友在现场观看了整个赛事过程。他告诉记者,此次来连主要想看看目前水下机器人最新的技术发展和技术瓶颈,他们的实验室,主攻人工智能和网络通信,水下机器人的主要研究方向是水下探测和水下感知、作业协同能力。杨仁友告诉记者,目前,国内水下机器人还是人机协作模式,以人的判断为主。希望通过我们的努力,能让水下机器人达到可以模仿人的操作过程,可以在水下像鱼一样自由、敏捷地游走、作业。目前来看,水下作业最大的难题是弱通信、弱感知,而这又是水下客观存在的环境。这些都需要去攻克。完成这些,不仅需要一定的学科支撑,也需要国内这些代表水下机器人顶级水平高校的联手协作。